
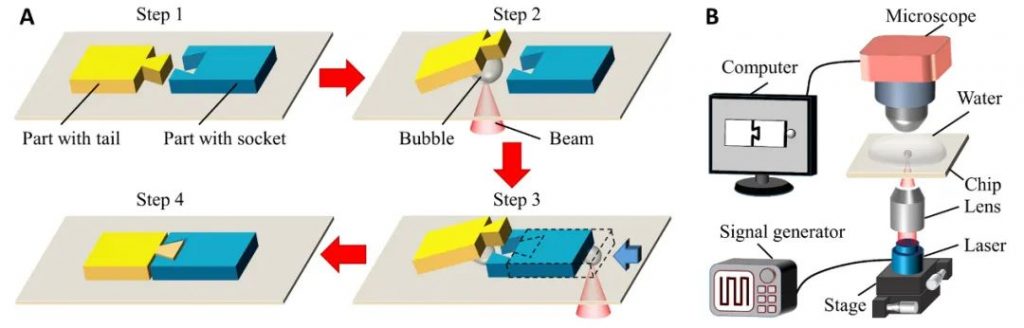
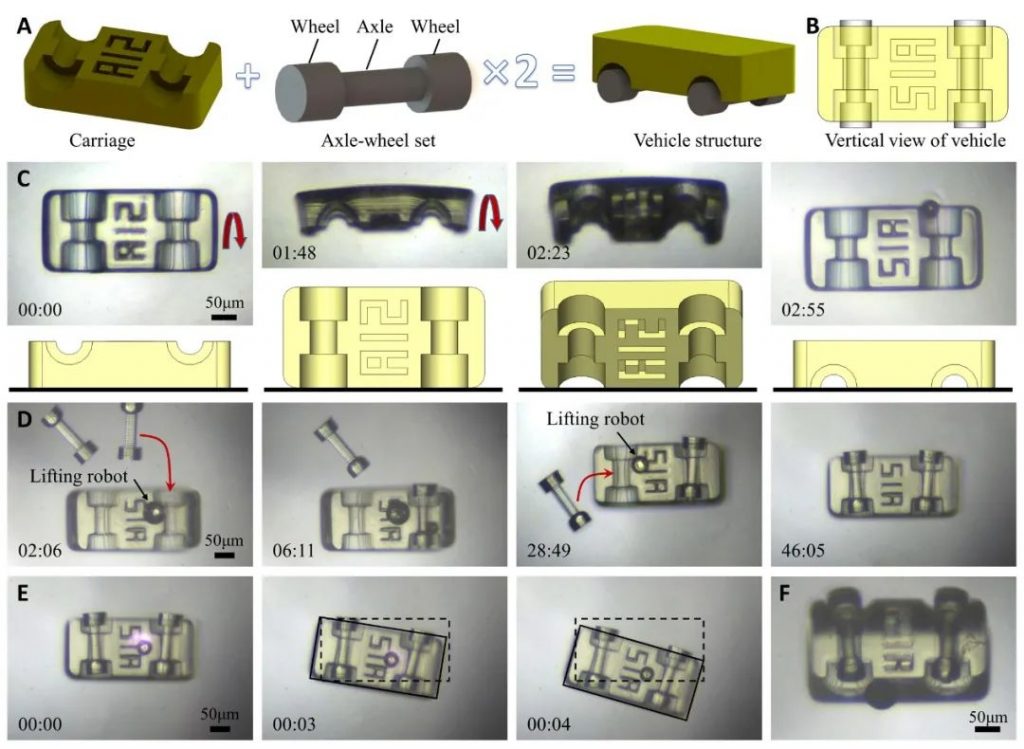
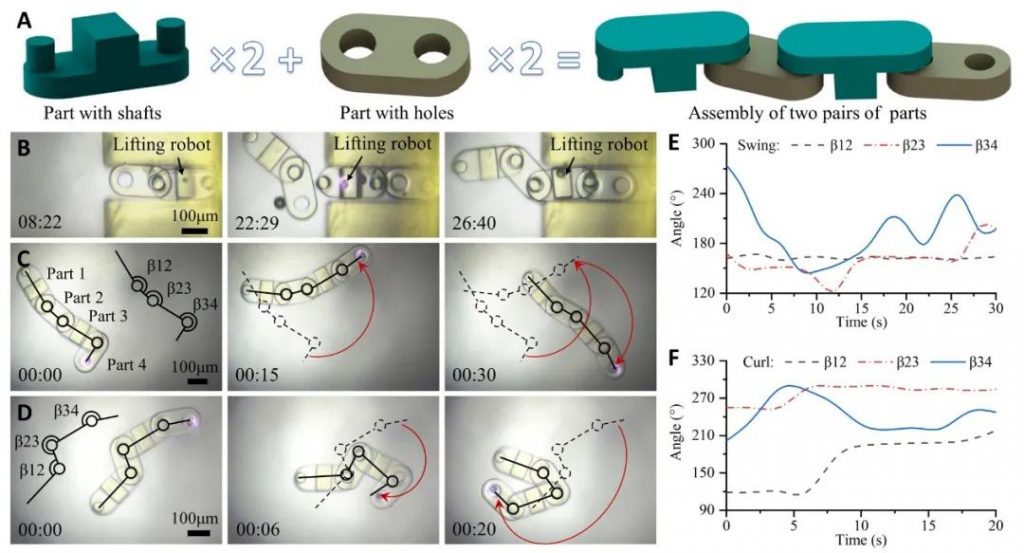
當激光照射在非晶矽表面時,由於光熱效應,在固液界面處會產生一個氣泡,並可在激光的控制下進行移動。當氣泡產生在微模塊的底部時,氣泡可將微模塊抬起。本研究利用氣泡產生過程快而溶解過程慢的特點,先控制一個氣泡將微零件抬起,然後利用第二個氣泡移動另一個微零件。當第一個氣泡緩慢消失時,第一個零件緩慢落下,兩個微零件能夠裝配在一起。利用氣泡對微零件的三維操作能力,將二維組裝變為三維裝配。

-

Formlabs Form 3L 光固化3D列印機
Formlabs -

Formlabs Form3 光固化3D列印機
Formlabs -

microArch® P150-25微米3D列印機
microArch® 微米精密3D列印 -

microArch® S130-2微米3D列印機
microArch® 微米精密3D列印 -

microArch® S140/P140-10微米3D列印機
microArch® 微米精密3D列印 -
microArch® S230-2微米3D列印機
microArch® 微米精密3D列印 -

-

-
